AIの頭脳を拡張する技術で、どこまで未来の生活を豊かにできるか
MOTOKI MAKOTO-
背景
生物の脳の神経回路の仕組みをロボット制御に応用させ、
社会インフラの発展に貢献していく私の研究目的は、ロボットの頭脳を拡張し、社会インフラの発展に貢献することです。
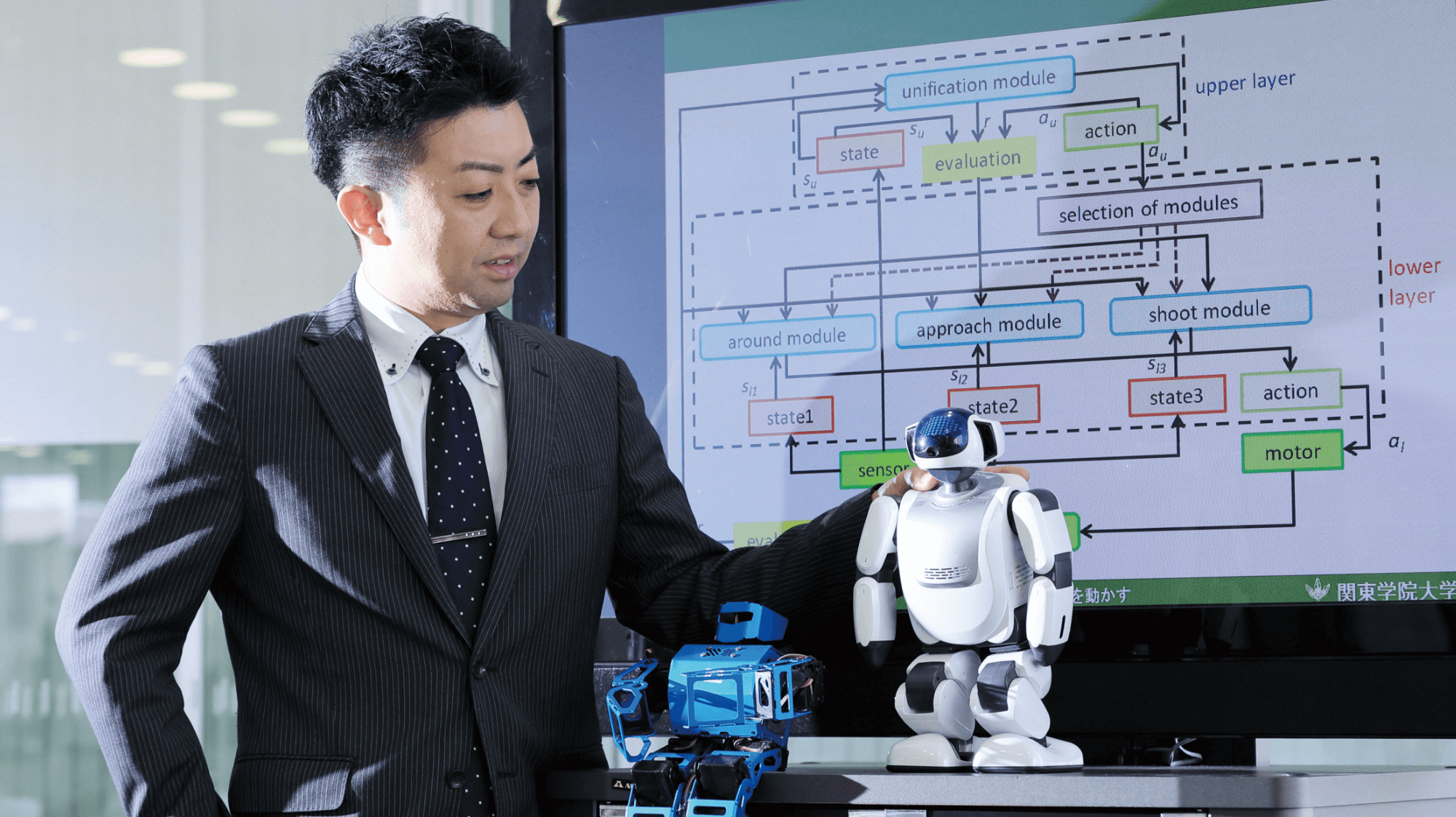
主に、ニューラルネットワークの機械学習手法であるディープラーニングの研究に取り組んでいます。ニューラルネットワークとは、生物の神経細胞(ニューロン)を数理モデル化したもののことで、人間の脳の中にはたくさんのネットワークがつながっていて、ニューロン間の信号の伝達によって情報処理を行っています。そうした生物の脳の神経回路の仕組みをロボットの制御に応用していく、そういった研究を行っています。 -
目的
人間の学習プロセスと同じことをロボットに応用させ、
その取り組みを様々な分野へ応用すること私の研究室では、ロボットの頭脳にあたるソフトウェアの開発を行っています。開発したソフトウェアをロボットに実装して、実際にトライアンドエラーを繰り返しながら、より高度な動きを学習するためのデータを収集しています。例えば、前を歩く人との距離をセンサーで検知してロボットに追走させる実験では、過去のセンサーで取得した位置情報や車輪の回転速度などのビッグデータをロボットに学習させることで、次のテストではよりスムーズな運動が可能になりました。私たち人間の学習プロセスと同じことをロボットに応用する。こういった取り組みを様々な分野へ応用させていくことが主な目的です。
-
提案手法
防犯カメラの画像処理にディープラーニングの
技術を応用させていくこうした研究は、防犯カメラの画像処理などにも役立ちます。
防犯カメラの映像には不鮮明なものが多く、個人を特定するのが困難なケースもあります。そこで、人間の顔の大量のデータを機械に学習させることで、低画質の画像から実際の顔を予測して再現する『超解像技術』の実現を目指しています。また、カメラ×ビッグデータの組み合わせで、人の命を救う分野にもニューラルネットワークの研究を応用した事例があります。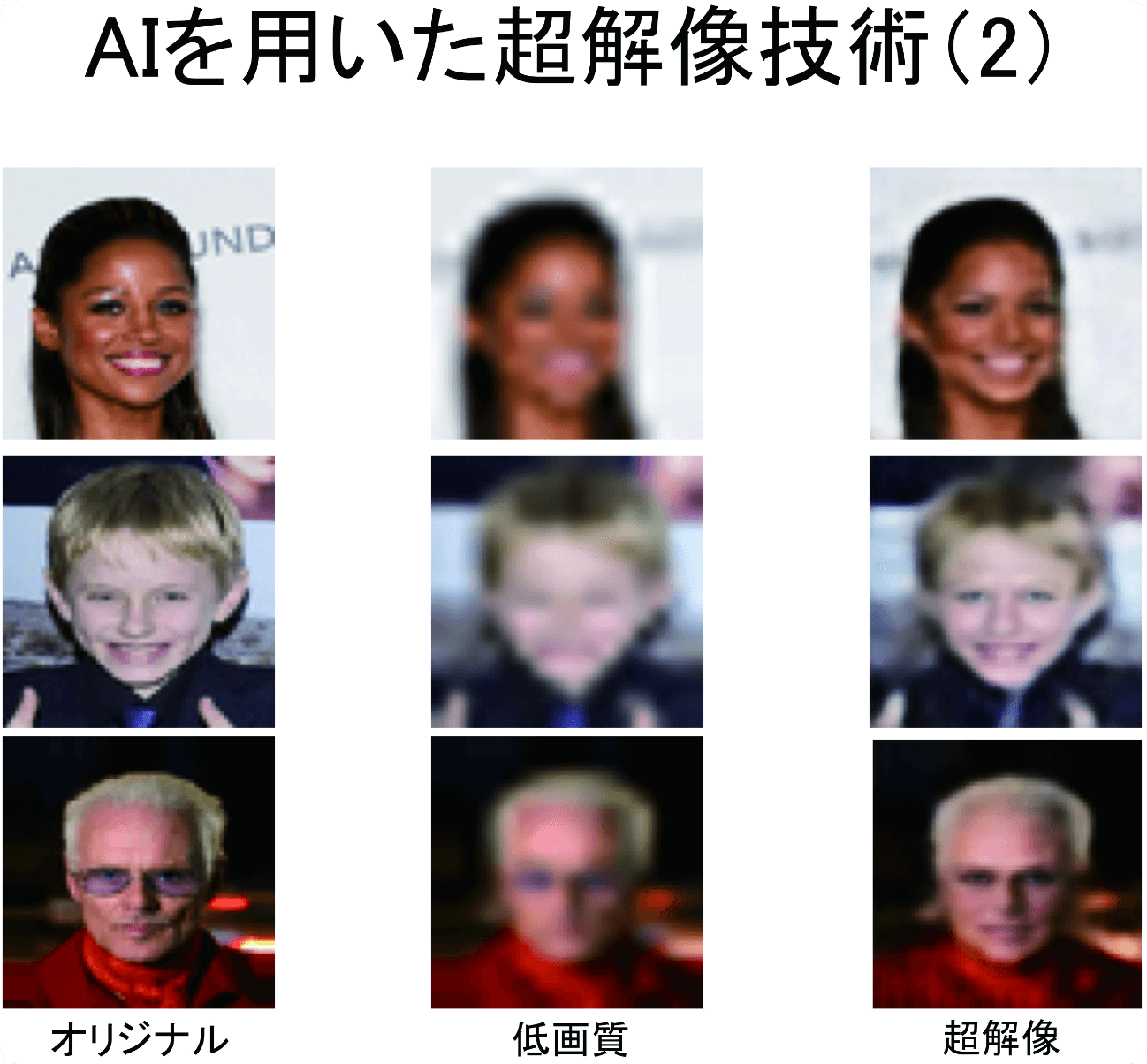
-
検証
ニューラルネットワークの研究で、災害時の
避難誘導の自動化を目指してニューラルネットワークの研究のもうひとつ重要な応用事例、それは「群集の移動方向の推定」です。人間の眼では、群集の複雑な
動きを認識して、行動を予測することはできません。しかし、カメラで複数の対象を検出し、機械学習によって群集の動きを解析す
れば、移動方向を予測することができるのです。こうした技術を持ったAIをドローンに搭載すれば災害時の避難誘導を自動化できる
かもしれないと考えています。 -
まとめ・効果
AI技術を用いて、豊かな生活を実現していく
ディープラーニングのような機械学習技術は、今後の社会インフラのあり方を大きく変えていく可能性を秘めています。AIの技術で未来の生活を豊かにするその日まで、日々一歩ずつ研究に取り組んでいます。
SITE CONTENTS








